控制阀执行机构和定位器
控制阀需要执行机构来操作。本教程简要讨论电动和气动执行机构的区别、正作用和反作用术语之间的关系,以及这对阀门控制作用的影响。讨论了定位器的重要性,包括它们的功能以及为什么许多应用需要它们。
执行机构 在第5章”控制理论”中,使用了一个类比来描述简单的过程控制:
- 手臂肌肉和手(执行机构)转动阀门 -(被控装置)。
现在已介绍了一种控制装置——控制阀。执行机构是下一个逻辑上需要关注的领域。
控制阀的操作涉及将其可动部件(阀芯、球体或阀瓣)相对于阀门的固定阀座进行定位。阀门执行机构的目的是根据控制信号的要求精确定位阀芯。
执行机构接收来自控制系统的信号,并根据信号将阀门移动到全开或全闭位置,或更开或更闭的位置(取决于使用的是”开关”还是”连续”控制动作)。
有几种提供这种执行的方式。本章将重点介绍两种主要方式:
- 气动。
- 电动。 其他重要的执行机构包括液压和直作用类型。这些在第7章”控制设备:自作用控制”中讨论。
气动执行机构 - 操作和选项
气动执行机构通常用于驱动控制阀,有两种主要形式:活塞执行机构(图6.6.1)和膜片执行机构(图6.6.2)
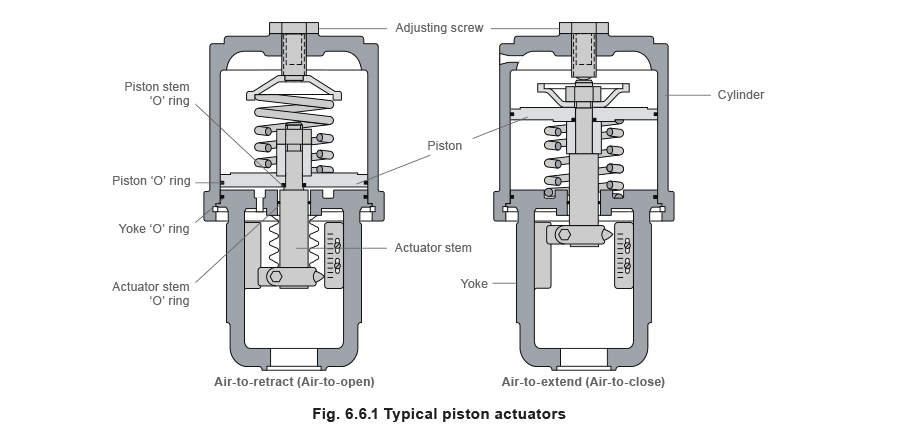
活塞执行机构
活塞执行机构通常用于膜片执行机构行程太短或推力太小的场合。压缩空气施加在实心缸体内的实心活塞上。活塞执行机构可以是单作用或双作用,能够承受更高的输入压力,并可提供更小的缸体体积,从而实现高速动作。
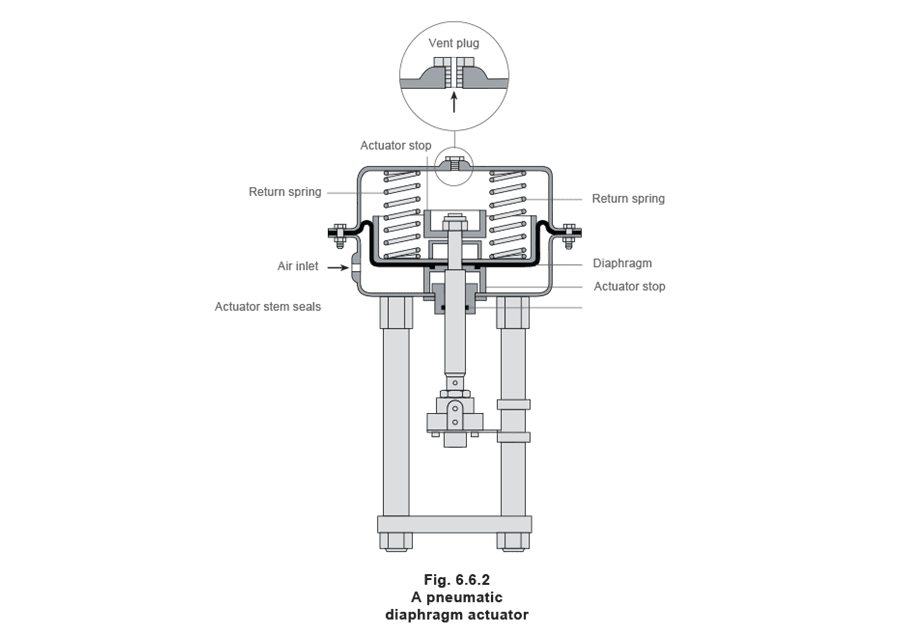
膜片执行机构
膜片执行机构的压缩空气施加在称为膜片的柔性薄膜上。图6.6.2显示了一种滚动膜片,其有效膜片面积在整个执行机构行程中几乎保持不变。这类执行机构是单作用的,即空气仅供应到膜片的一侧,可以是正作用(弹簧回缩式)或反作用(弹簧伸出式)。
 反作用(弹簧伸出式)
操作力来自压缩空气压力,施加在柔性膜片上。执行机构的设计使得由空气压力产生的力乘以膜片面积后,能够克服弹簧施加的(反向)力。
反作用(弹簧伸出式)
操作力来自压缩空气压力,施加在柔性膜片上。执行机构的设计使得由空气压力产生的力乘以膜片面积后,能够克服弹簧施加的(反向)力。
膜片(图6.6.2)被向上推,拉动阀杆向上,如果阀杆连接到正作用阀门,则阀芯被打开。执行机构的设计使得在特定的气压变化下,阀杆将移动足够距离以使阀门从全闭到全开完成整个行程。
随着气压降低,弹簧将阀杆向相反方向移动。气压范围等于规定的执行机构弹簧额定值,例如0.2 - 1 bar。
对于较大的阀门和/或需要克服的较高压差,需要更多的力才能实现阀门的完全移动。
要产生更大的力,需要更大的膜片面积或更高的弹簧范围。这就是为什么控制设备制造商会提供一系列气动执行机构来匹配一系列阀门——包括不断增大的膜片面积和不同的弹簧范围以产生不同的力。
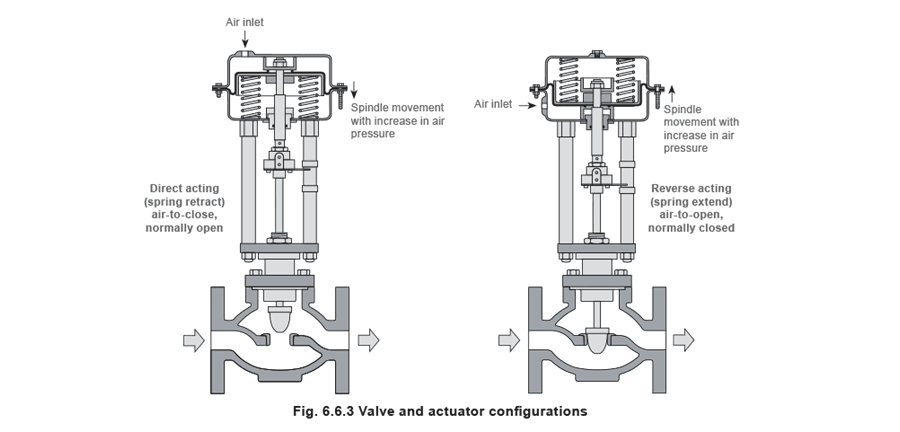
图6.6.3中的图表显示了基本气动执行机构的组件以及阀杆随气压增加的移动方向。
 正作用执行机构(弹簧回缩式)
正作用执行机构设计为弹簧位于膜片下方,空气供应到膜片上方的空间。结果是,随着气压增加,阀杆移动方向与反作用执行机构相反。
正作用执行机构(弹簧回缩式)
正作用执行机构设计为弹簧位于膜片下方,空气供应到膜片上方的空间。结果是,随着气压增加,阀杆移动方向与反作用执行机构相反。
这种移动对阀门开度的影响取决于所用阀门的设计和类型,如图6.6.3所示。
然而,还有一种替代方案,如图6.6.4所示。正作用气动执行机构连接到具有反作用阀芯(有时称为”悬挂式阀芯”)的控制阀。
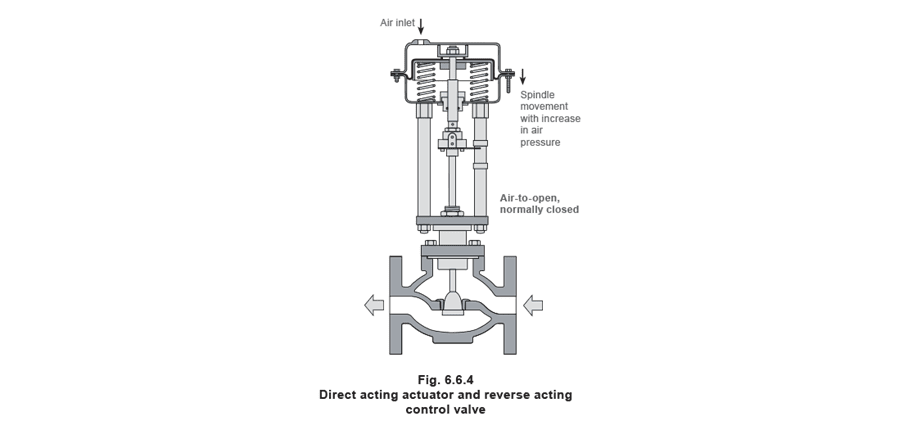 在正作用和反作用气动控制之间的选择取决于在压缩空气供应发生故障时阀门应恢复到的位置。阀门应该关闭还是全开?这个选择取决于应用的性质和安全要求。蒸汽阀门在气源故障时关闭是合理的,而冷却阀门在气源故障时打开是合理的。必须考虑执行机构和阀门类型的组合。
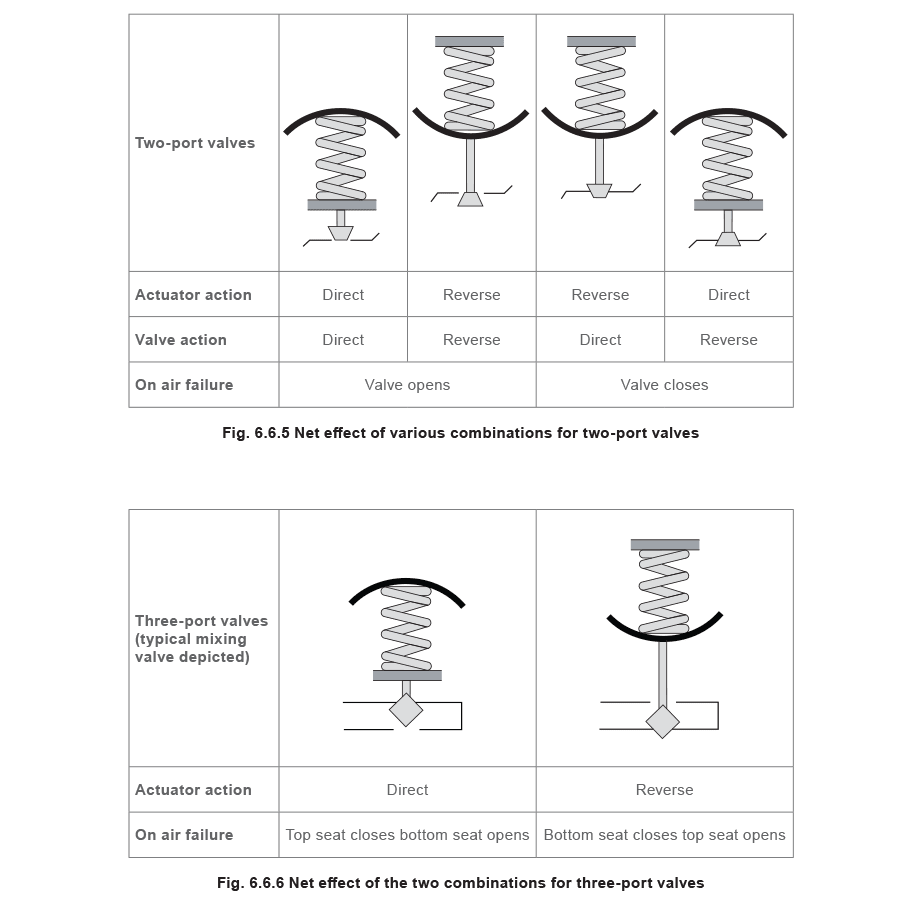
图6.6.5和图6.6.6显示了各种组合的最终效果。
在正作用和反作用气动控制之间的选择取决于在压缩空气供应发生故障时阀门应恢复到的位置。阀门应该关闭还是全开?这个选择取决于应用的性质和安全要求。蒸汽阀门在气源故障时关闭是合理的,而冷却阀门在气源故障时打开是合理的。必须考虑执行机构和阀门类型的组合。
图6.6.5和图6.6.6显示了各种组合的最终效果。
 压差对阀门升程的影响
供应到膜片室的空气是来自气动控制器的控制信号。最广泛使用的信号气压是0.2 bar至1 bar。考虑一个带有标准0.2至1.0 bar弹簧的反作用执行机构(弹簧伸出式),安装在正作用阀门上(图6.6.7)。
压差对阀门升程的影响
供应到膜片室的空气是来自气动控制器的控制信号。最广泛使用的信号气压是0.2 bar至1 bar。考虑一个带有标准0.2至1.0 bar弹簧的反作用执行机构(弹簧伸出式),安装在正作用阀门上(图6.6.7)。
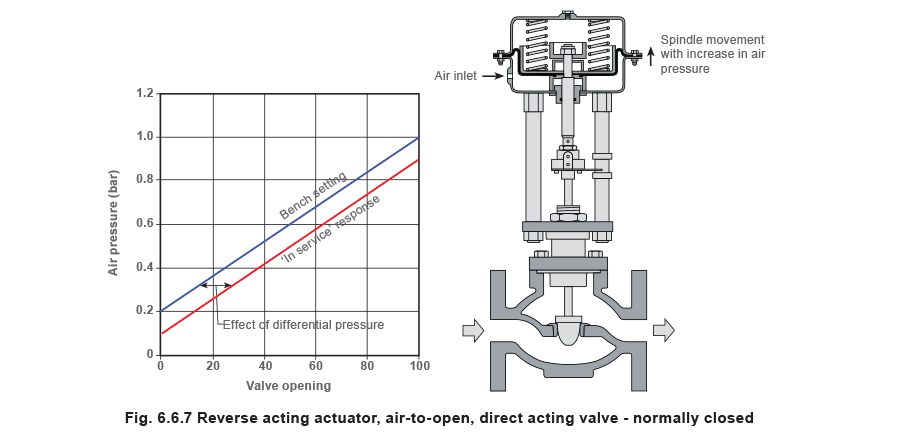 当阀门和执行机构组件被校准(或”台架设定”)时,调节到0.2 bar的气压刚好开始克服弹簧的阻力并使阀芯离开阀座。
当阀门和执行机构组件被校准(或”台架设定”)时,调节到0.2 bar的气压刚好开始克服弹簧的阻力并使阀芯离开阀座。
随着气压增加,阀芯逐渐远离阀座移动,直到最终在1 bar气压下阀门100%打开。这在图6.6.7中以图形方式显示。
现在考虑该组件安装在管道中用于减压应用,上游侧为10 bar g,控制下游压力为4 bar g。
阀门上的压差为10 - 4 = 6 bar。该压力作用在阀芯底部,提供一个倾向于打开阀门的力。该力是执行机构中气压提供的力的附加力。
因此,如果执行机构以0.6 bar的气压供气(例如,0.2和1 bar的中间值),阀门不会达到预期的50%开度位置,实际开度将更大,因为有压差提供的额外力。
此外,这个额外力意味着阀门在0.2 bar时并未关闭。在本示例中,要关闭阀门,控制信号必须降低到约0.1 bar。
在控制换热器温度的蒸汽阀门中情况略有不同,因为阀门上的压差将在以下范围内变化:
- 最小值,当工艺需要最大热量且控制阀100%打开时。
- 最大值,当工艺达到温度且控制阀关闭时。 换热器中的蒸汽压力随热负荷增加而增加。这可以在第6.5章示例6.5.3和表6.5.7中看到。
如果控制阀上游的压力保持不变,那么随着换热器中蒸汽压力的升高,阀门上的压差必须降低。
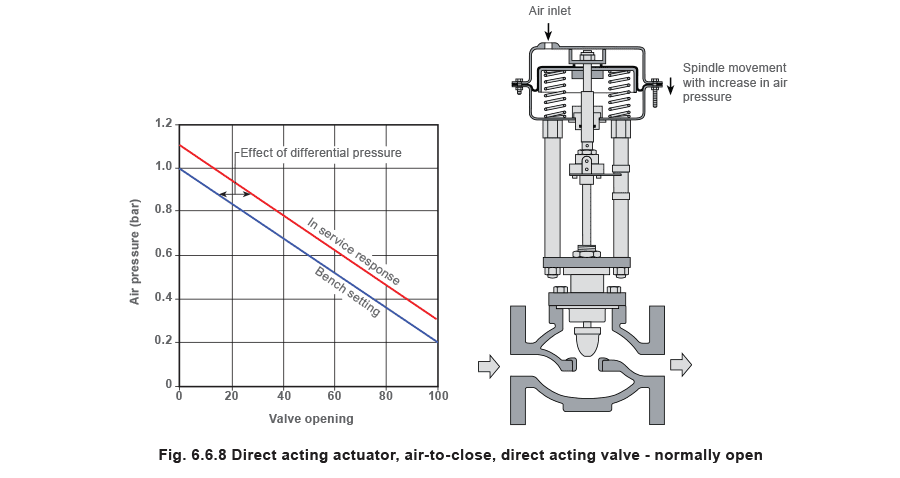
图6.6.8显示了气压施加到正作用执行机构的情况。在这种情况下,由压差在阀芯上产生的力与气压相反作用。效果是,如果执行机构以0.6 bar的气压供气,例如,阀门不会达到预期的50%开度位置,由于压差提供的额外力,百分比开度将更大。在这种情况下,控制信号必须增加到约1.1 bar才能完全关闭阀门。
 可以重新校准阀门和执行机构以考虑压差产生的力,或者使用不同的弹簧、气压和执行机构组合。这种方法可以在小阀门、低压差和不需要精确控制的情况下提供经济的解决方案。然而,实际情况是:
可以重新校准阀门和执行机构以考虑压差产生的力,或者使用不同的弹簧、气压和执行机构组合。这种方法可以在小阀门、低压差和不需要精确控制的情况下提供经济的解决方案。然而,实际情况是:
- 较大的阀门有更大的面积供压差作用,从而增加产生的力,并对阀门位置产生越来越大的影响。
- 较高的压差意味着产生更高的力。
- 阀门和执行机构产生摩擦,导致迟滞。较小的阀门相对于总力来说可能有更大的摩擦。 解决方案是在阀门/执行机构组件上安装定位器。(定位器的更多信息将在本章后面给出)。
**注意:**为简单起见,上述示例假设不使用定位器,且迟滞为零。
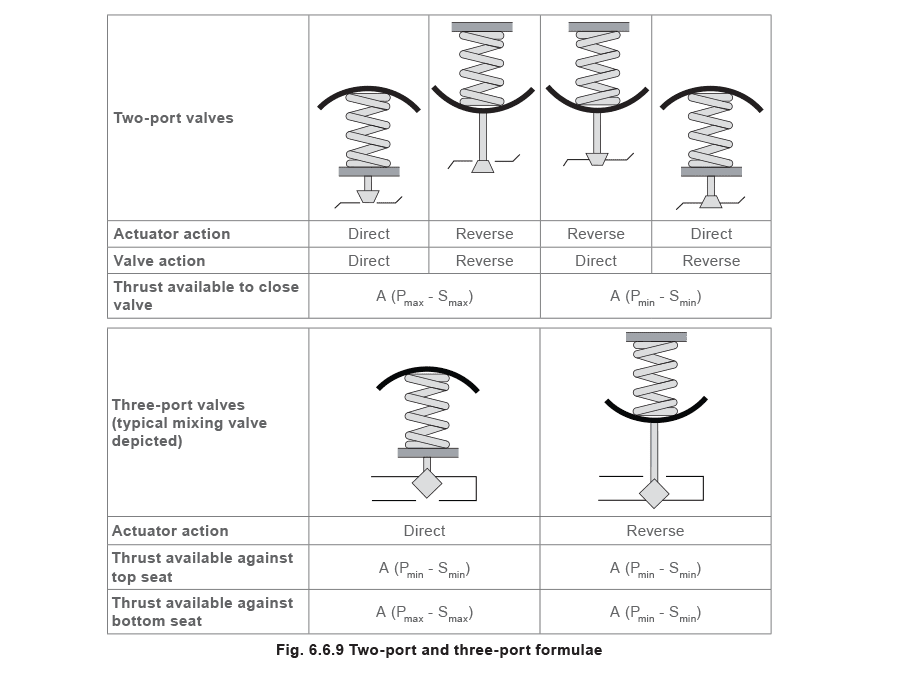
用于确定各种阀门和执行机构组合的保持阀门关闭可用推力的公式如图6.6.9所示。
其中:
A = 膜片有效面积
Pmax = 执行机构最大压力(通常为1.2 bar)
Smax = 弹簧最大台架设定值
Pmin = 执行机构最小压力(通常为0 bar)
Smin = 弹簧最小台架设定值
关闭阀门的可用推力必须提供三个功能:
- 克服关闭位置处的流体压差。
- 克服阀门和执行机构中的摩擦,主要在阀门和执行机构杆密封处。
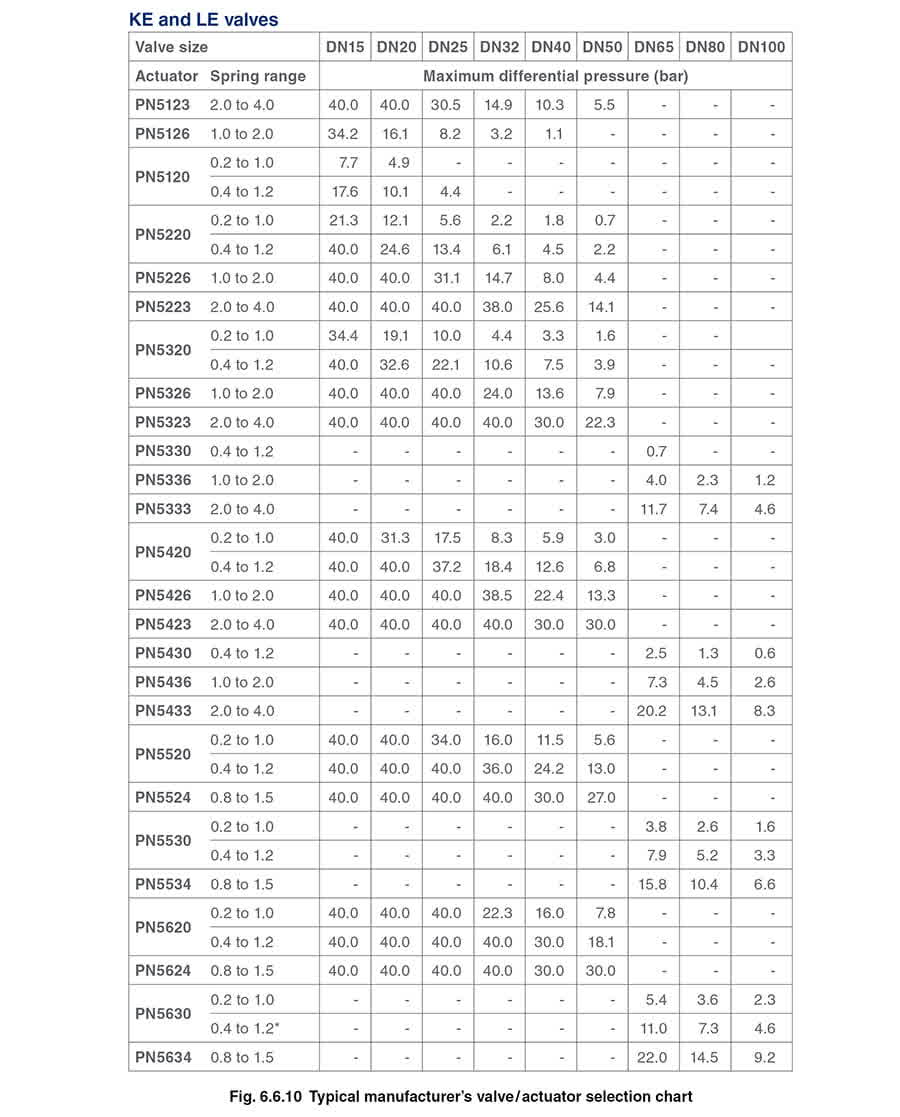
- 在阀芯和阀座之间提供密封载荷以确保所需的关断紧密度。 控制阀制造商通常会提供其各种阀门和执行机构/弹簧组合能够运行的最大压差的完整详细信息;图6.6.10中的表格就是这种数据的一个示例。
**注意:**使用定位器时,需参考制造商文献了解最小和最大气压。
定位器 对于许多应用,膜片室中0.2至1 bar的压力可能不足以应对摩擦和高压差。可以使用更高的控制压力和更强的弹簧,但实际的解决方案是使用定位器。
这是一个附加装置(见图6.6.11),通常安装在执行机构的支架或支柱上,并通过反馈臂连接到执行机构的阀杆,以监测阀门位置。它需要自己更高的气源压力来定位阀门。
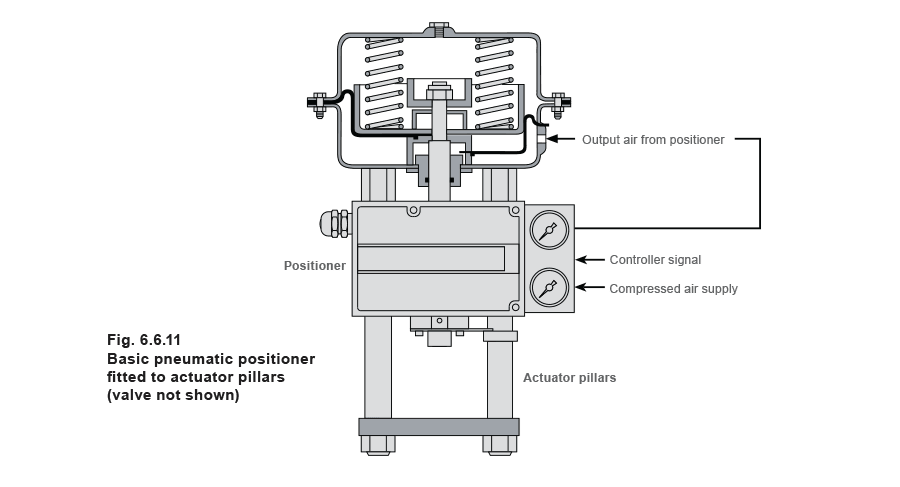 阀门定位器将输入信号与阀门位置关联起来,并根据阀门的要求和最大供气压力的限制,向执行机构提供任何输出压力以满足这种关系。
当定位器安装在”气开式”阀门和执行机构布置上时,可以增加弹簧范围以增加关闭力,从而增加特定阀门可以承受的最大压差。气压也将根据需要进行调整以克服摩擦,从而减少迟滞效应。
示例:以安装在DN50阀门上的PN5400系列执行机构为例(见图6.6.10中的表格)
阀门定位器将输入信号与阀门位置关联起来,并根据阀门的要求和最大供气压力的限制,向执行机构提供任何输出压力以满足这种关系。
当定位器安装在”气开式”阀门和执行机构布置上时,可以增加弹簧范围以增加关闭力,从而增加特定阀门可以承受的最大压差。气压也将根据需要进行调整以克服摩擦,从而减少迟滞效应。
示例:以安装在DN50阀门上的PN5400系列执行机构为例(见图6.6.10中的表格)
电动执行机构 ****在无法获得或不适合使用气源的情况下,可以使用电动执行机构来控制阀门。电动执行机构使用电动机,电压要求在以下范围内:230 Vac、110 Vac、24 Vac和24 Vdc。 有两种类型的电动执行机构:VMD(阀门电机驱动)和调节型。
VMD(阀门电机驱动) 这种基本版本的电动执行机构有三种状态:
- 驱动阀门打开。
- 驱动阀门关闭。
- 不移动。
 图6.6.20显示了VMD系统,执行机构的正向和反向行程由任何外部3位或两个2位开关单元直接控制。开关按执行机构电压额定,可以用合适的继电器替代。
图6.6.20显示了VMD系统,执行机构的正向和反向行程由任何外部3位或两个2位开关单元直接控制。开关按执行机构电压额定,可以用合适的继电器替代。
VMD执行机构内部装有限位装置以保护电机免受超行程损坏。这些装置基于最大电机扭矩或物理位置限位开关。两种装置都通过中断电机电源来停止电机驱动。
- 位置限位开关的优点是可以调节以限制过大阀门的行程。
- 扭矩开关的优点是能在阀座上给出明确的关闭力,在阀杆卡死的情况下保护执行机构。
- 如果仅使用位置限位开关,可以与弹簧加载联轴器组合以确保阀门紧密关断。 VMD执行机构可用于开关动作或调节控制。控制器通过驱动阀门打开或关闭一定时间来定位阀门,以确保其达到所需位置。阀门位置反馈可与某些控制器配合使用。 调节型 为了根据系统要求定位控制阀,可以使用调节型执行机构。这些装置可能具有更高额定功率的电机(通常1200次启动/小时),并可能内置电子设备。
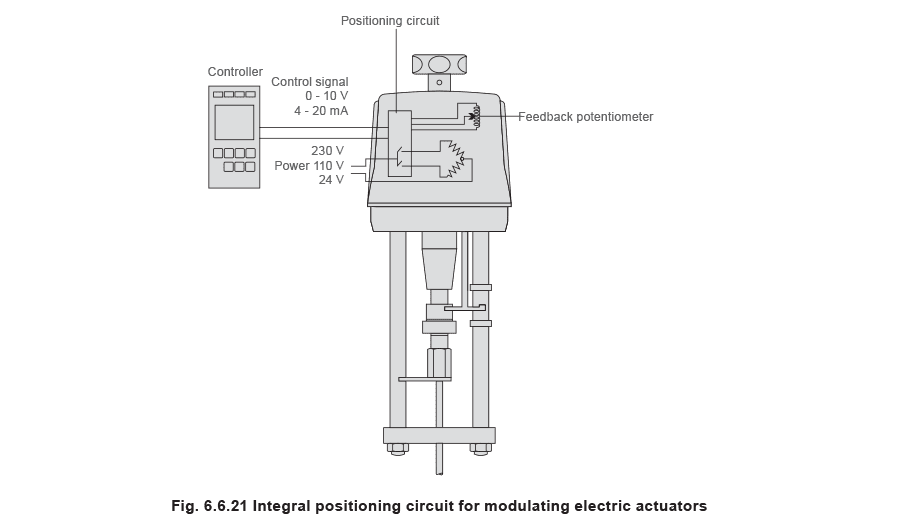
调节型执行机构中可包含一个定位电路,该电路接受模拟控制信号(通常为0-10 V或4-20 mA)。然后执行机构将此控制信号解释为限位开关之间的阀门位置。
为此,执行机构有一个位置传感器(通常为电位器),将实际阀门位置反馈给定位电路。这样执行机构可以按控制信号的比例在其行程范围内定位。调节型执行机构的示意图如图6.6.21所示。
 气动执行机构具有固有的故障安全特性;如果气源或控制信号故障,阀门将关闭。为了在电动执行机构中提供此功能,可提供”弹簧储备”版本,在电源或控制信号故障时打开或关闭阀门。或者,可以使用电池电源提供故障安全功能。
气动执行机构具有固有的故障安全特性;如果气源或控制信号故障,阀门将关闭。为了在电动执行机构中提供此功能,可提供”弹簧储备”版本,在电源或控制信号故障时打开或关闭阀门。或者,可以使用电池电源提供故障安全功能。
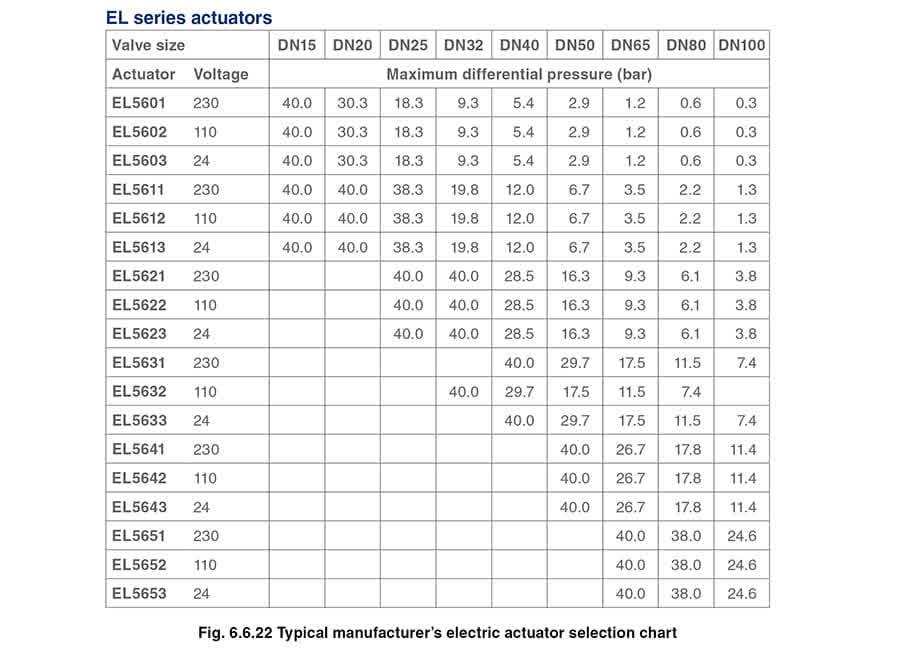
电动执行机构提供规定的力,在弹簧储备版本上可能有限制。选型时应始终参考制造商的图表。
选择执行机构时,明智的做法是参考制造商的技术数据表,了解阀门上的最大压差(见图6.6.22)。
电动执行机构的另一个限制是阀门移动速度,可能低至4秒/毫米,在快速变化的系统中可能太慢。