
阀门、执行器、传感器、控制器等设备的实用安装与调试建议。
阀门
阀门
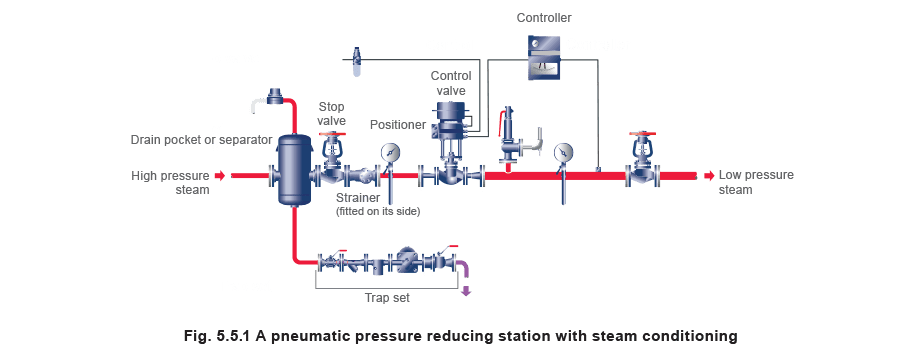
安装控制阀之前,有必要确保阀门的尺寸、压力等级、材料和端部连接均适用于预期的工作条件。 所有信誉良好的自动控制设备制造商都会提供详细的说明书,涵盖其设备的正确安装步骤。同时还会提供设备调试方法以及需要执行的日常维护内容。在大多数情况下,制造商还会提供现场调试服务。在某些情况下,可以签订定期售后维护合同。模块5.5涵盖了安装前需要考虑的主要事项。 控制阀上游和下游的管道应畅通无阻。如果阀门受到管路变形应力的影响,其正常操作将会受到损害。必须确保所有法兰接头方正平直,管道得到充分支撑。 控制阀通常应安装在水平管道中,阀杆保持垂直。 管道系统在使用前通常需要进行压力测试。测试压力可能高于正常工作条件下的压力。必须确保控制阀及其内部部件能够承受此较高的测试压力。 控制阀本质上属于精密仪表,如果允许灰尘或其他研磨性或阻塞性物质进入,将会受到损坏。在大多数应用中,必须在任何控制阀上游安装管道过滤器来防止这种情况。 阀门还必须便于进行日常维护,如填料压盖的重新填装和内部部件的更换。为此,阀门两侧安装全通径隔离阀可以将维护期间的设备停机时间降至最低。 如果设备必须始终保持运行,即使在控制阀检查或维护期间也是如此,则可能需要安装带阀门的旁路。但旁路中使用的阀门必须是高质量的,应采用具有流量特性的节流阀或正确Kvs值的另一台控制阀。正常运行期间通过旁路的任何泄漏都会影响控制系统的动作。在任何情况下均不建议安装手动旁路。控制阀的安装必须确保流经阀门的介质流向正确。通常在控制阀阀体上铸有”流向”箭头。阀门必须具有合适的流量能力,并产生可接受的压力损失。 在蒸汽管道中,如图5.5.1所示,在阀门上游安装汽水分离器和/或疏水点非常重要。这样可以防止冷凝水通过控制阀携带,否则会缩短阀门的使用寿命。当控制阀可能长时间关闭时,该疏水点也很重要。如果不安装冷凝水排放装置,阀门开启时可能发生水锤并造成严重损坏。安装汽水分离器和过滤器可确保良好的蒸汽质量。
执行器/传感器
执行器/传感器
同样,必须遵守制造商的使用说明。执行器通常垂直安装在控制阀上方,但如果电动执行器安装在处理高温介质(如蒸汽)的阀门上,可能会推荐不同的安装方式。 通常情况下,执行器应远离过热、高湿度或腐蚀性烟气等环境条件。这些条件可能导致膜片或电气/电子部件过早失效。制造商应说明其设备推荐的最高环境温度条件。对于某些电动执行器,如果执行器内部可能发生冷凝,可选用内置加热器的型号。在无法避免此类环境条件的情况下,应购买适合安装条件的执行器。 执行器、定位器等的外壳通常具有符合国家电气规范的防护等级。该等级应标明外壳对粉尘和水侵入的防护程度。如果电动执行器的外壳防水等级较低,而在使用中可能会被水冲洗,那么使用这样的执行器毫无意义。 必须注意确保传感器充分且正确地浸入,以便有效执行其感测功能。使用保护套管可以在不排空管道系统、容器或工艺设备的情况下进行检查或更换。但保护套管会延迟响应时间。在套管中使用导热膏可以最大限度地减少响应延迟。
动力和信号管线
动力和信号管线
对于气动系统,压缩空气和气动信号管线必须干燥、无油无尘且密封无泄漏。将气动控制器安装在靠近阀门和执行器的位置可以最大限度地减少因信号管线容量和阻力造成的延迟。 通常,阀门、执行器及任何定位器或转换器会作为一个完整的预组装单元供货。如果不是,则需要将执行器安装到阀门上,并将定位器(用于气动控制)安装到执行器上。然后必须正确设置整个组件,以确保实现正确的阀门行程等,所有操作均应按照制造商的说明进行。
电动/电子及电气气动控制的电气接线
许多表面上的”控制”问题往往归结为接线错误。举一个极端的例子,将110 V电源连接到24 V额定电机将会造成损坏!接线系统必须按照制造商的说明仔细操作,并遵守当地法规。 电气系统中经常遇到”噪声”或电气干扰,导致难以诊断的操作问题。可能需要使用屏蔽电缆、单独接地的导管或自力式/模拟控制器。电缆应保护免受机械损坏。
控制器
控制器
如前所述,应用过程通常产生的变化速度慢于控制系统的响应时间。这就是为什么控制器的参数——比例带或增益、积分时间和微分时间——必须针对每个特定应用/任务进行整定。 有多种调整控制器参数的方法,其中大多数涉及数学运算。控制环路的行为可以通过数学方法预测,但过程或应用特性通常通过经验测量来确定,这可能比较困难。虽然可以找到基于设计传热比的方法,但这些方法不在本模块的讨论范围内。 在设定控制参数之前,有必要回顾每个控制项(P、I和D)以及关于设置的三种情况,例如:过宽、过窄和正确。
比例带(图5.5.2)
比例带(图5.5.2)
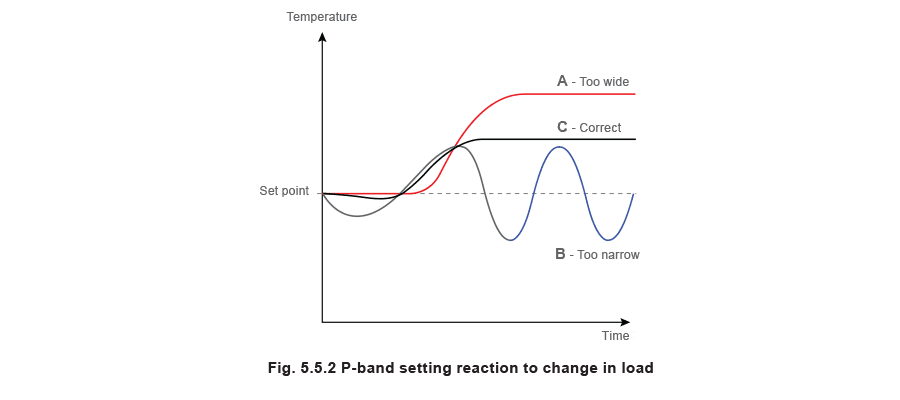
如果比例带过宽,会产生较大的偏差但系统非常稳定(曲线A)。 缩小比例带将减小偏差。 过窄的比例带会导致不稳定和振荡(曲线B)。 最佳比例带(曲线C)是在略宽于引起持续振荡的设置处实现的。
比例带(比例作用)总结
正确的比例带 = 良好的稳定性,良好的响应 存在一定偏差
较大的比例带 = 更好的稳定性,较慢的响应 较大的偏差
较小的比例带 = 不稳定,较快的响应 较小的偏差但伴有振荡
积分作用(图5.5.3)
积分作用(图5.5.3)
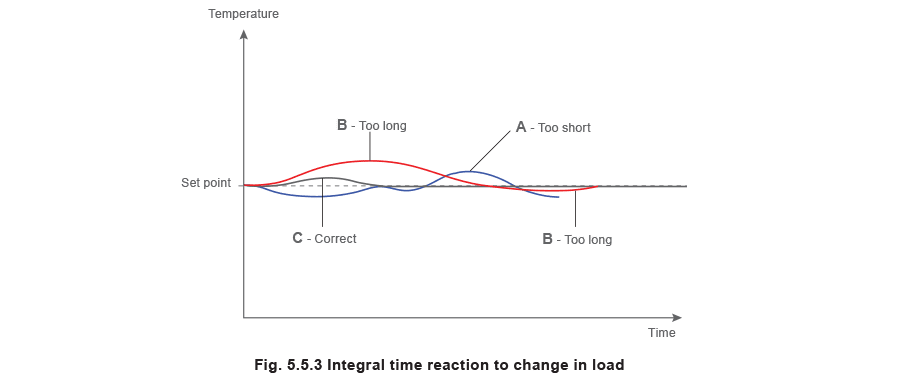
积分时间过短时,温度(曲线A)会越过设定点并产生一定的振荡。 积分时间过长会导致温度返回设定点的时间过长(曲线B)。 曲线C显示了正确的积分时间设定,温度在不产生超调或振荡的情况下尽快返回设定点。
| 积分作用总结 | ||
| 正确的IAT = | 消除偏差 | 稳定——无超调 |
| IAT过短 = | 消除偏差 | 响应过快,导致不稳定和超调 |
| IAT过长 = | 消除偏差 | 响应缓慢,稳定,无超调 |
微分作用(图5.5.4)
微分作用(图5.5.4)
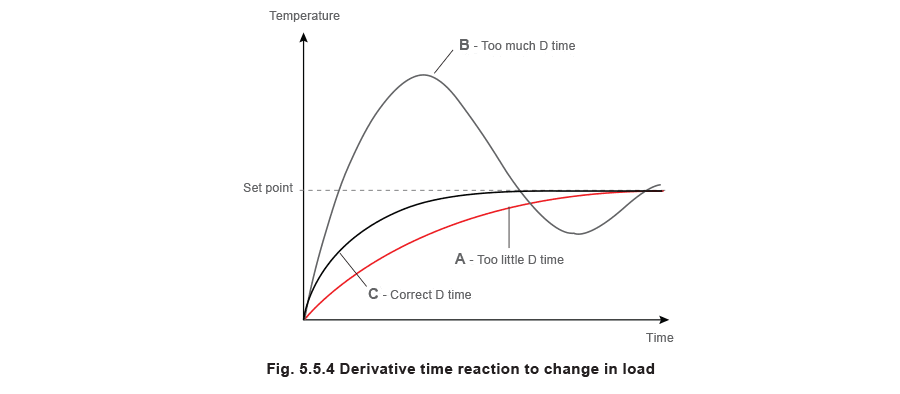
微分时间过长会导致温度变化过快,产生超调和振荡(曲线B)。 微分时间过短会使温度偏离设定点的时间过长(曲线A)。 最佳设定使温度尽快回到设定点,同时保持良好的稳定性(曲线C)。
| 微分作用总结 | |
| 正确的微分时间 = | 响应迅速,稳定 |
| 微分时间过长 = | 响应更快但导致超调和不稳定 |
| 微分时间过短 = | 响应较慢 |
控制器调试的实用方法
控制器调试的实用方法
每台控制器都需要单独设置以匹配特定系统的特性。虽然有多种不同的技术可以实现稳定和快速的控制,但Ziegler-Nichols方法已被证明非常有效。
Ziegler-Nichols方法
Ziegler-Nichols方法
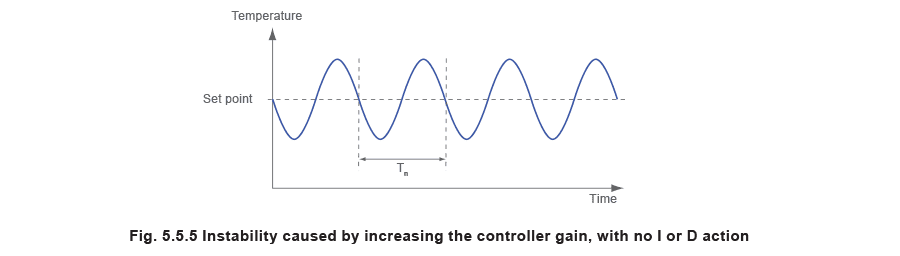
Ziegler-Nichols频率响应法(有时称为临界振荡法)在建立实际负载的控制器设定方面非常有效。该方法将控制器用作放大器以达到不稳定点。在该点上,整个系统的运行方式是温度围绕设定点以恒定幅值波动(见图5.5.5)。增益的微小增加或比例带的减小将使系统变得不稳定,控制阀将开始以逐渐增大的幅值振荡。 反之,增加比例带将使过程更加稳定,幅值将逐步减小。在不稳定点,可以获得实际运行条件下(包括换热器、控制阀、执行器、管道和温度传感器)的系统特性。 通过Ziegler-Nichols方法,可以通过读取温度周期的时间周期(Tn)和不稳定点时的实际比例带设定来确定控制器设定值。
使用Ziegler-Nichols方法选择PID参数设定的步骤如下:
- 将积分时间(Ti)增大到最大值以消除控制器的积分作用。
- 将微分时间(TD)设定为0以消除控制器的微分作用。
- 等待过程达到稳定状态。
- 减小比例带(增大增益)直至达到不稳定点。
- 测量一个周期的时间(Tn),并记录此时控制器上的实际P带(比例带)设定。
- 以此设定为起点,根据图5.5.6中的数值计算适当的控制器设定。
图5.5.6 Ziegler-Nichols计算
图5.5.6 Ziegler-Nichols计算
| 比例带 | 积分时间 | 微分时间 | |
|---|---|---|---|
| P I D 控制 | P带 x 1.7 | Tn/2 | Tn/8 |
| P I 控制 | P带 x 2.2 | Tn/1.2 | |
| P 控制 | P带 x 2.0 |
控制器设定可以进一步调整以提高稳定性或响应速度。改变PID参数设定对控制稳定性和响应的影响如图5.5.7所示。
图5.5.7 改变PID设定的影响
图5.5.7 改变PID设定的影响
| 稳定性 | 响应 | |
| 增大P带 | 增强 | 变慢 |
| 增大Ti | 增强 | 变慢 |
| 增大TD | 减弱 | 变快 |
无扰切换
无扰切换
控制器的技术规格中包含许多其他术语,其中一个经常遇到的术语是”无扰切换”。 大多数控制器都配备”手动”-“自动”开关,在某些控制情况下可能需要手动控制。这使得中断自动控制回路成为必要。如果没有无扰切换功能,从自动切换到手动以及反向切换将意味着控制水平的丢失,除非手动输出与自动输出匹配。 无扰切换确保输出——无论是手动到自动还是自动到手动——相匹配,只需适当移动开关即可。
自整定控制器
自整定控制器
现代微处理器使得一些过去需要计算机才能实现的功能能够集成到控制器的有限空间中。其中包括”自整定”功能。无需调试工程师手动设定PID项的自整定控制器已经面世多年。自整定控制器会切换到开关控制模式一段时间。在此期间,它分析其响应的结果,计算并设定自己的PID项。 过去,自整定功能只能在系统启动期间进行;一旦由控制器设定,PID项将保持不变,无论此后过程如何变化。 现代控制器现在可以运行所谓的自适应功能,它不仅设定所需的初始PID项,还会在正常运行期间根据过程变化监控并在必要时重新设定这些参数。 此类控制器广泛可用且价格相对低廉。即使在相对不太复杂的控制任务中,其使用也日益普及。