关于控制系统各组成部分的说明,包括阀门、执行器、传感器和控制器;以及控制方法和系统动态特性的介绍,包括简单控制回路和反馈系统。
什么是控制回路?
什么是控制回路?
本模块介绍由阀门、执行器、传感器、控制器以及工艺本身的动态特性组成的完整控制系统的讨论。 控制回路
开环控制系统
开环控制意味着没有来自被控条件的直接反馈;换句话说,没有信息从被控制的过程或系统反馈回来通知控制器需要采取校正动作。图 5.3.1 所示的供暖系统通过在被加热房间外部使用传感器来演示这一点。图 5.3.1 所示的系统不是实际供暖控制系统的示例;它仅用于描述开环控制的原理。
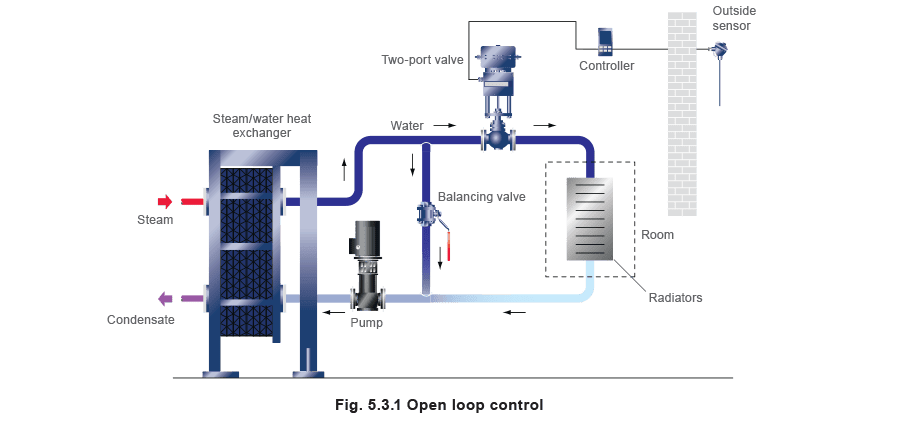
该系统由一个带有外部传感器(检测环境气温)的比例控制器组成。控制器可以设置一个相当大的比例带,使得在环境温度为 -1°C 时阀门全开,在环境温度为 19°C 时阀门全关。由于环境温度会影响建筑物的热损失,因此有望控制室温。
然而,没有关于室温和因其他因素造成的加热的反馈。 在温和的天气中,尽管水流量正在控制,但其他因素(如高太阳辐射得热)可能导致房间过热。换句话说,开环控制只能提供对应用的粗略控制。 图 5.3.2 描绘了一个稍复杂的控制系统,带有两个传感器。
闭环控制
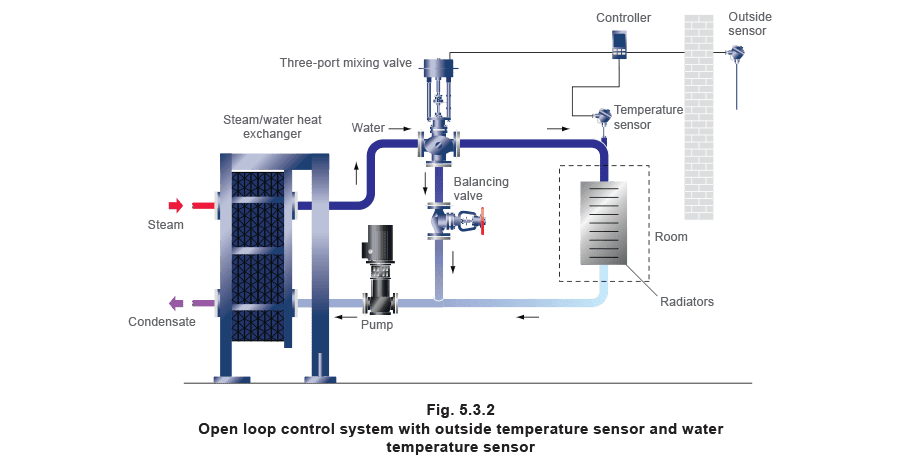
该系统使用一个三通混合阀,配有执行器、控制器和外部空气传感器,外加水管路中的温度传感器。
外部温度传感器为控制器提供远程设定点输入,用于偏移水温设定点。通过这种方式,闭环控制应用于流经散热器的水温。 当外部寒冷时,水以最高温度流经散热器。随着外部温度升高,控制器自动降低流经散热器的水温。 然而,就室温而言,这仍然是开环控制,因为没有来自建筑物或被加热空间的反馈。如果散热器选型过大或存在设计错误,仍然会出现过热。
闭环控制
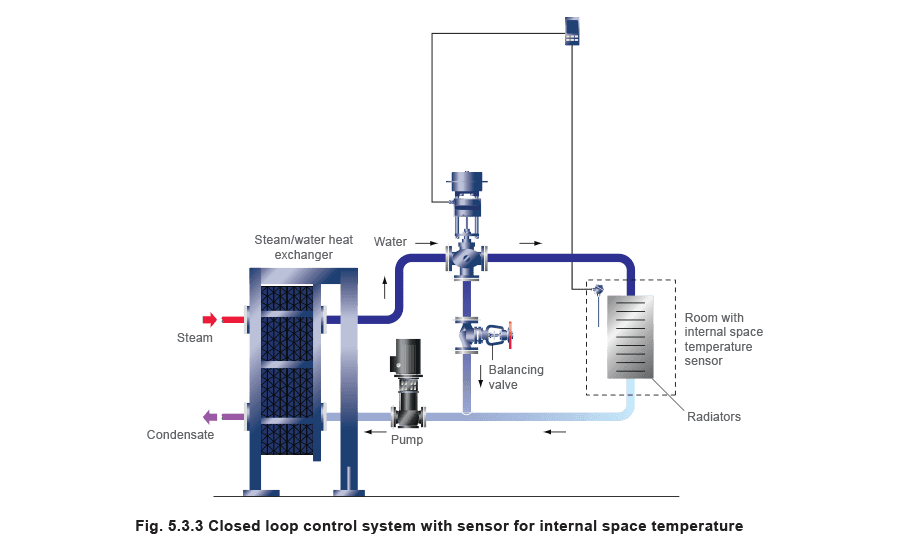
很简单,闭环控制需要反馈;直接从过程或系统发回的信息。使用图 5.3.3 所示的简单供暖系统,增加一个室内空间温度传感器将检测室温,并提供相对于房间的闭环控制。 在图 5.3.3 中,阀门和执行器通过房间中的空间温度传感器控制,提供来自实际室温的反馈。
扰动
扰动
扰动是进入过程或系统以扰乱被控介质数值的因素。这些扰动可由负荷变化或外部影响引起。 例如,在一个简单的供暖系统中,如果房间突然挤满了人,这就构成了一个扰动,因为它会影响房间温度以及维持所需空间温度所需的热量。
反馈控制
反馈控制
这是另一种类型的闭环控制。反馈控制考虑扰动并将此信息反馈给控制器,以便采取校正动作。例如,如果有大量人员进入房间,空间温度将升高,这将导致控制系统减少对房间的热量输入。
前馈控制
前馈控制
在前馈控制中,任何扰动的影响在事件实际发生之前就被预见并加以考虑。 一个例子是在将大型蒸汽使用工艺设备上线之前,先将锅炉升至高火状态。事件的顺序可能是工艺设备被开启。此动作不是打开通往工艺的蒸汽阀,而是指令锅炉燃烧器转为高火。只有达到高火位置后,工艺蒸汽阀才被允许打开,然后以缓慢、受控的方式打开。
单回路控制
单回路控制
这是最简单的控制回路,只涉及一个被控变量,例如温度。为了解释这一点,考虑图 5.3.4 所示的汽-水换热器。
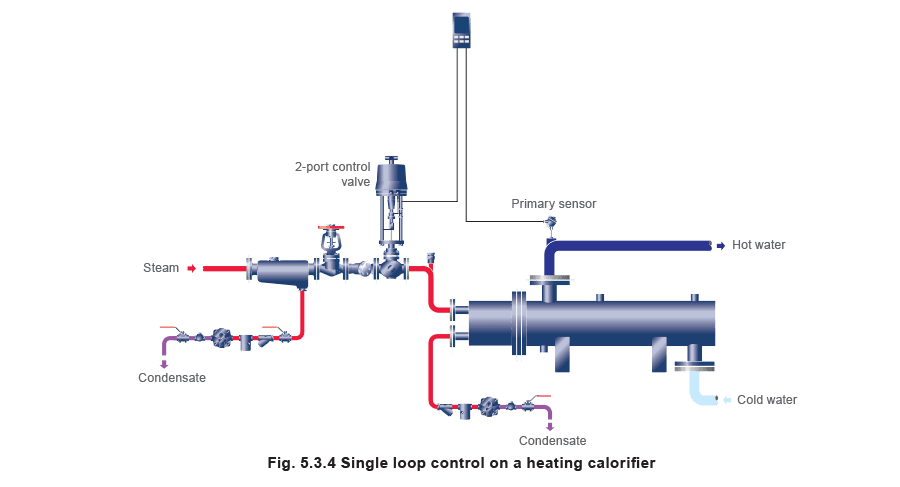
图 5.3.4 中唯一受控的变量是离开换热器的水温。这是通过控制向换热器供汽的两通蒸汽阀来实现的。一次传感器可以是检测水温的热电偶或 PT100 铂电阻温度计。
控制器将来自传感器的信号与控制器上的设定点进行比较。如果有差值,控制器向阀门的执行器发送信号,执行器将阀门移动到新的位置。控制器还可能包括输出指示器,显示阀门开启的百分比。 单回路控制为供暖系统和工业过程提供了绝大部分控制。 单回路控制的其他术语包括:
- 设定值控制
- 单闭环控制
- 反馈控制
多回路控制
多回路控制
以下示例考虑了一个慢速移动的木基产品的应用,该产品必须控制在特定的湿度水平(见图 5.3.5 和图 5.3.6)。
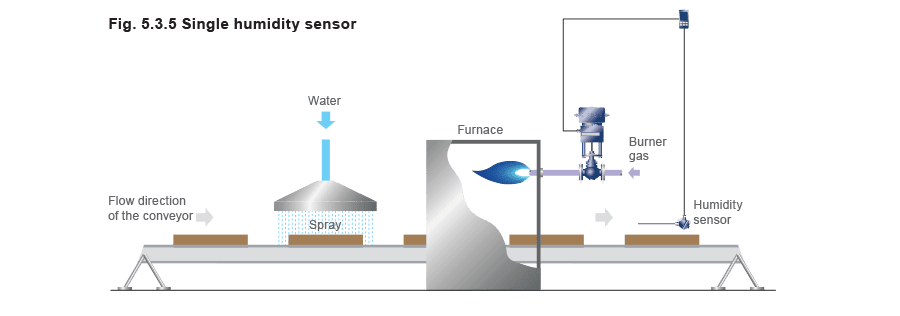
在图 5.3.5 中,传送带末端的单个湿度传感器控制加热炉添加的热量。但如果喷水速率由于供水压力的波动而改变,可能需要大约 10 分钟产品才能到达传送带远端并使湿度传感器做出反应。这将导致产品质量的波动。
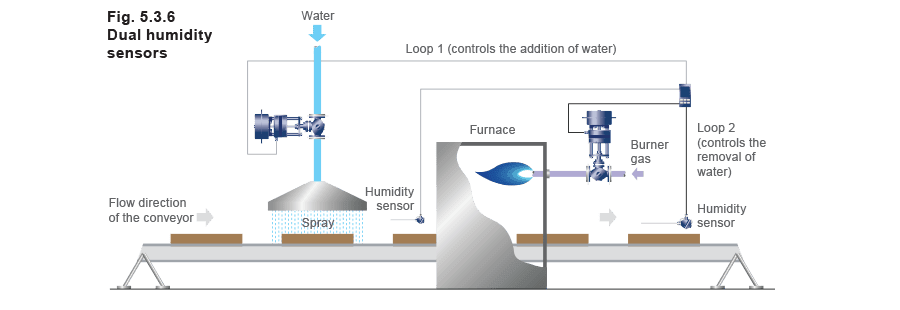
为了改善控制,可以在喷水后立即安装第二个湿度传感器在另一个控制回路中,如图 5.3.6 所示。该湿度传感器为控制器提供远程设定点输入,用于偏移本地设定点。本地设定点设定在加热炉后所需的湿度。这以简单的形式说明了多回路控制。 该湿度控制系统由两个控制回路组成:
- 回路 1 控制水的添加。
- 回路 2 控制水的去除。 在此过程中,各种因素将影响两个回路。有些因素(如水压)会影响两个回路。回路 1 将尝试对此进行修正,但任何由此产生的误差都会对回路 2 产生影响。
串级控制
串级控制
当需要用一个阀门控制两个独立变量时,可以使用串级控制系统。 图 5.3.7 显示了一个装满液体产品的蒸汽夹套容器。工艺的基本方面相当严格:
- 容器中的产品必须加热到一定温度。
- 蒸汽不得超过一定温度,否则产品可能会变质。
- 产品温度升高的速度不得超过一定速率,否则产品可能会变质。 如果使用普通的单回路控制,将传感器放在液体中,在工艺开始时传感器会检测到低温,控制器会指示阀门移动到全开位置。这将导致夹套中蒸汽温度过高造成的问题。
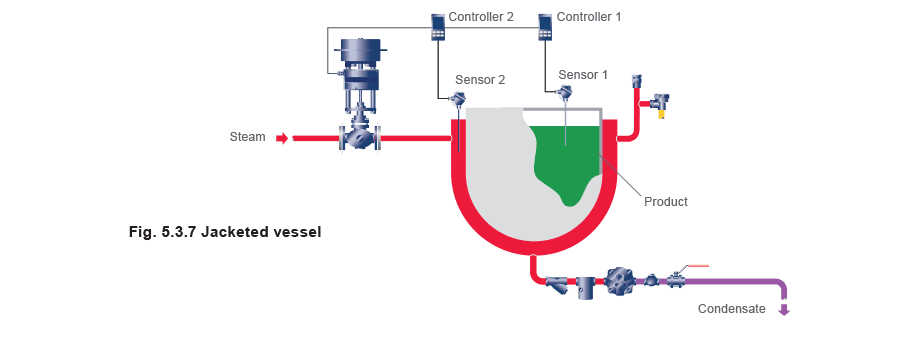
解决方案是使用带有两个控制器和两个传感器的串级控制:
- 从控制器(控制器 2)和传感器监测夹套中的蒸汽温度,并向控制阀输出信号。
- 主控制器(控制器 1)和传感器监测产品温度,控制器输出指向从控制器。
- 主控制器的输出信号用于改变从控制器的设定点,确保不超过蒸汽温度。 示例 5.3.1 应用于工艺容器的串级控制示例 液体温度要从 15°C 加热到 80°C,并在 80°C 下保持两小时。 在任何情况下蒸汽温度不得超过 120°C。 产品温度升高的速度不得超过 1°C/分钟。 主控制器可以进行斜坡控制,使水温升高速率不超过指定值。 主控制器设置为反作用模式,使其向从控制器的输出信号在低温时为 20 mA,在高温时为 4 mA。 从控制器上的远程设定点设定为:当蒸汽温度为 80°C 时其向阀门的输出信号为 4 mA,当蒸汽温度为 120°C 时为 20 mA。通过这种方式,蒸汽温度不能高于系统可承受的温度,夹套中的蒸汽压力不能高于 120°C 时的饱和压力 1 bar g。
过程的动态特性
过程的动态特性
这是一个非常复杂的主题,但本文的这一部分将涵盖最基本的考虑因素。 “时间常数”这一术语在模块 5.1 中已经概述,涉及执行器运动时间的定义;但重申一下,它是控制系统由于给定的温度(或其他变量)阶跃变化而达到其总运动量的大约三分之二所需的时间。 控制系统的其他部分将具有类似的基于时间的响应——控制器及其组件和传感器本身。所有仪器在其输入和后续输出之间都有时间滞后。即使是传输系统也会有时间滞后——对于电动/电子系统来说不是问题,但对于气动传输系统来说可能需要考虑。 图 5.3.8 和 5.3.9 显示了热电偶安装在保护套管中检测水温的一些典型响应滞后。
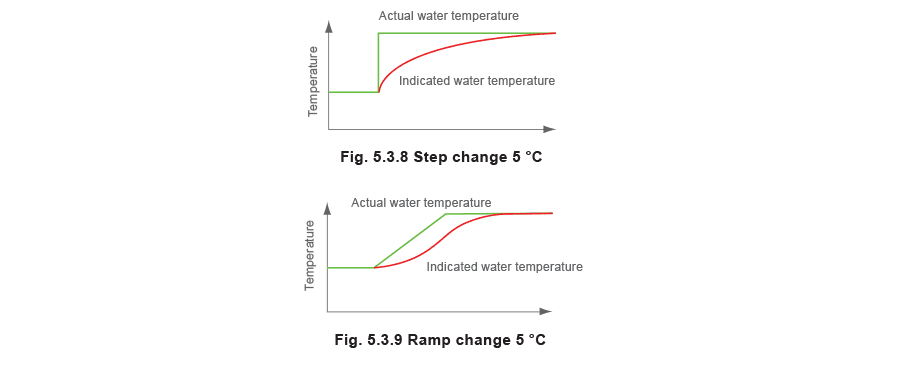
除了传感器响应的延迟外,控制系统的其他部分也会影响响应时间。对于气动和自力式系统,阀门/执行器的运动趋向于平稳,在比例控制器中,与传感器处的温度偏差成正比。
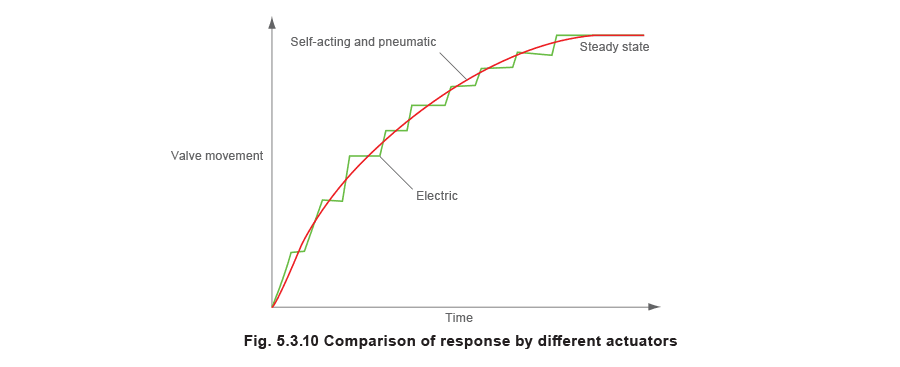
对于电动执行器,由于电机移动控制连杆所需的时间,存在延迟。由于控制信号是一系列脉冲,电机提供间歇性的运动,随后是执行器静止的时段。响应图(图 5.3.10)描述了这一点。然而,由于过程响应的延迟,最终受控温度仍然可以是平滑的。
本模块涵盖的控制系统只考虑了稳态条件。然而,被控制的过程或设备可能受到按照某种行为模式变化的影响。控制系统要求过程以可预测的方式运行。如果过程变化迅速,那么控制系统必须能够快速反应。
如果过程变化缓慢,对控制系统运行速度的要求就不那么严格。 关于控制器和控制系统的静态和动态行为——灵敏度、响应时间等——已有大量文献记录。可能最重要的考虑因素是整个控制回路的时间滞后。 过程的动态特性需要考虑以选择正确类型的控制器、传感器和执行器。
过程响应
过程响应
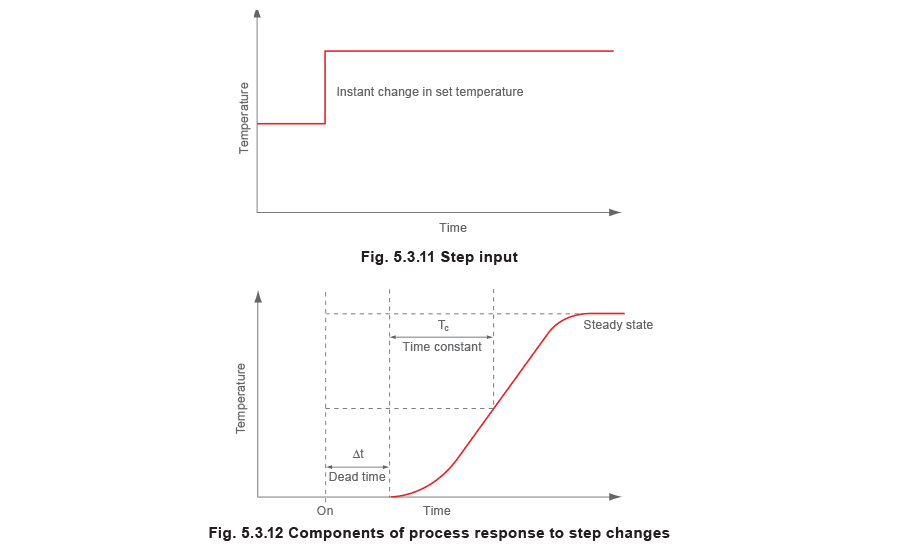
这些动态特性由过程对控制设置突然变化(称为阶跃输入)的响应来定义。这可能包括设定温度的即时变化,如图 5.3.11 所示。 系统的响应如图 5.3.12 所示,显示了过程温度开始上升之前有一定量的死区时间。此死区时间是由于电动执行器移动到其新位置等原因造成的控制滞后。时间常数将根据系统的动态响应而不同,受传感器是否安装在保护套管中等因素影响。
由于系统的原因,任何两个过程的响应可能具有不同的特性。
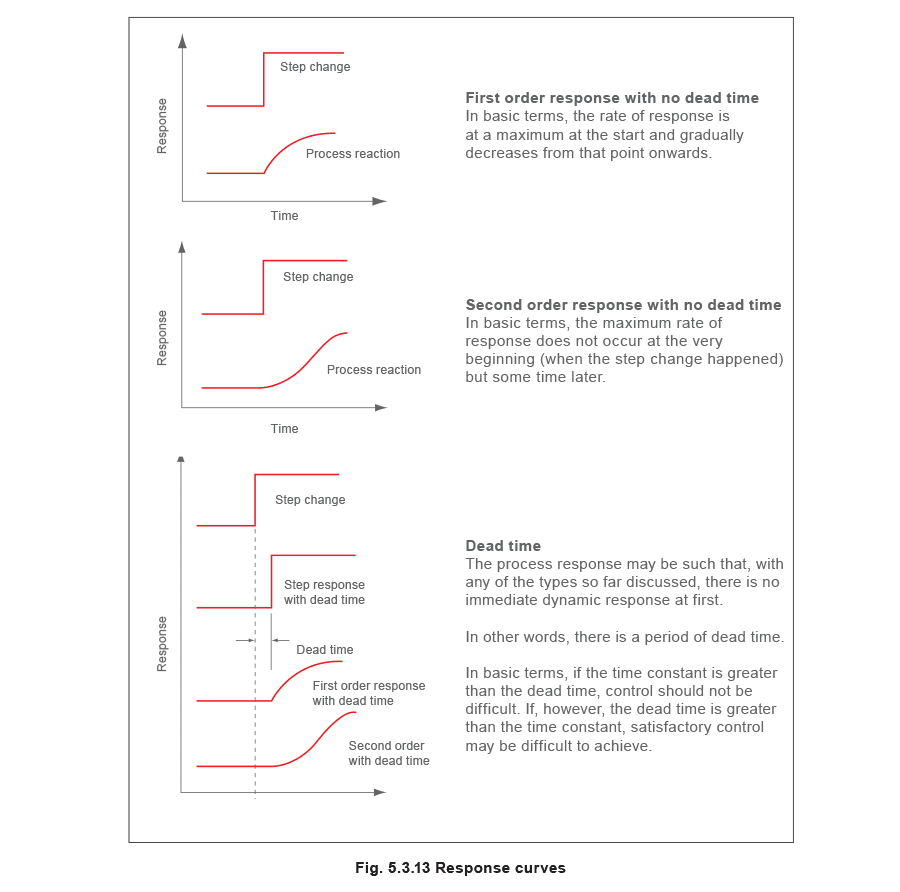
死区时间和时间常数对系统响应阶跃输入变化的影响如图 5.3.12 所示。 对输入变化具有快速初始响应速率的系统通常称为具有一阶响应。 对输入变化具有缓慢初始响应速率的系统通常称为具有二阶响应。 基本过程响应类型(死区时间、一阶响应和二阶响应的影响)概览如图 5.3.13 所示。