控制技术导论
本教程提供了自动控制领域的入门知识,包括控制系统的基本要素、不同的控制功能和相关术语,并重点介绍了安全性以及控制的稳定性和准确性。
自动控制的学科范围非常广泛,涵盖了温度、压力、流量、液位和速度等变量的控制。
本模块的目的是提供自动控制的入门介绍。这也可以分为两个部分:
- 供暖、通风和空调系统(通常称为 HVAC)的控制; 以及
- 过程控制。 两者都是极其广泛的学科,后者的范围从简单的家用炊具控制到大型石化工厂中的完整生产系统或工艺的控制。 控制工程师需要掌握多种技能——机械工程、电气工程、电子和气动系统的知识、HVAC 设计和工艺应用的实用知识,以及如今越来越重要的计算机和数字通信知识。 本模块的目的是提供自动控制实际和理论方面的基本见解,为未来补充其他技能奠定基础,而非将个人转变为控制工程师。 本模块仅限于使用以下流体的过程控制:蒸汽、水、压缩空气和导热油。 控制通常通过使用执行器驱动的阀门来改变流体流量来实现。对于上述流体,通常需要测量和响应温度、压力、液位、湿度和流量的变化。几乎总是,对这些物理属性变化的响应必须在给定时间内完成。阀门及其执行器随时间的综合操作,以及被测变量的精确控制,将在本模块后续部分进行说明。 流体的控制不仅限于阀门。一些工艺流体通过变速泵或风机的操作来调节。
自动控制的需要 过程工厂或建筑物需要自动控制有三个主要原因:
- 安全性 - 工厂或工艺必须安全运行。 工厂或工艺越复杂或越危险,对自动控制和安全保护协议的需求就越大。
- 稳定性 - 工厂或工艺应稳定、可预测和可重复地运行,不会出现波动或计划外停机。
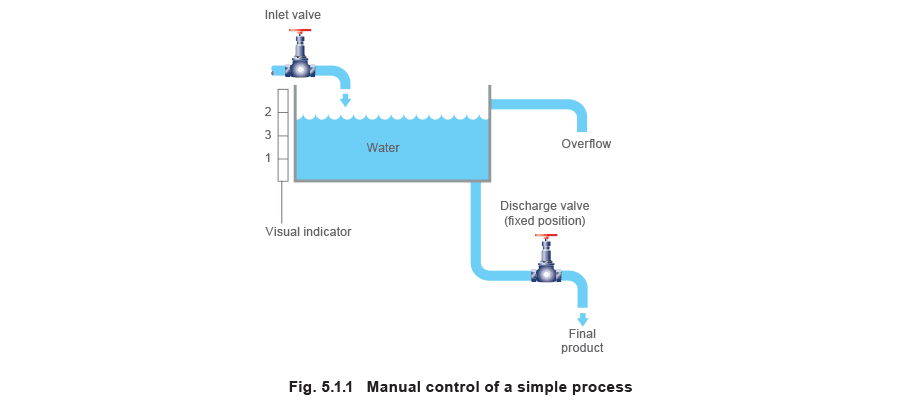
- 准确性 - 这是工厂和建筑的首要要求,用于防止损耗、提高质量和生产率,以及维持舒适度。这些是经济效益的基本要素。 其他可取的好处如经济性、速度和可靠性也很重要,但每个控制应用都将根据安全性、稳定性和准确性这三个主要参数来衡量。 自动控制术语 控制行业内使用特定的术语,主要是为了避免混淆。相同的词语和短语在控制的各个方面都会出现,当使用正确时,其含义是通用的。 示例 5.1.1 中描述的简单手动系统(如图 5.1.1 所示)用于引入控制工程中使用的一些标准术语。 示例 5.1.1 控制系统的简单类比 在所示的过程示例(图 5.1.1)中,操作员通过打开或关闭进水阀手动改变水流,以确保:
- 水位不会过高;否则水会通过溢流管流出浪费。
- 水位不会过低;否则将无法覆盖水箱底部。 其结果是,水以所需范围内的速率从水箱流出。如果水流出的速率过高或过低,它所供给的工艺就无法正常运行。 在初始阶段,排放管中的出水阀固定在某一位置。 操作员在水箱侧面标记了三条线,以便通过进水阀操纵供水。3 个液位代表:
- 允许的最低水位,以确保水箱底部被覆盖。
- 允许的最高水位,以确保不会通过溢流管排放。
- 介于 1 和 2 之间的理想液位。
该示例(图 5.1.1)说明了:
- 操作员的目标是将水箱中的水维持在液位 1 和 2 之间。水位被称为被控条件。
- 通过控制进水管中阀门的水流量来实现被控条件。该流量被称为操纵变量,阀门被称为被控装置。
- 水本身被称为控制介质。
- 通过控制流入水箱的水量,水箱中的水位发生变化。水位的变化被称为被控变量。
- 一旦水进入水箱,它就被称为被控介质。
- 在液位指示器上试图维持的水位被称为设定值(也称为设定点)。
- . 水位可以维持在液位指示器上 1 和 2 之间的任何位置,并且仍然满足控制参数——确保水箱底部被覆盖且不会溢流。此范围内的任何值都被称为期望值。
- 假设水位严格维持在 1 和 2 之间的任何位置。这就是稳态条件下的水位,被称为控制值或实际值。 注意:参考上述第(7)和(8)点,要维持的理想水位在点 3。但如果实际水位在 1 和 2 之间的任何位置,那仍然是可以接受的。设定点与实际值之间的差值被称为偏差。
- 如果进水阀关闭到新的位置,水位将下降,偏差也会变化。持续偏差被称为偏移量。 自动控制的要素
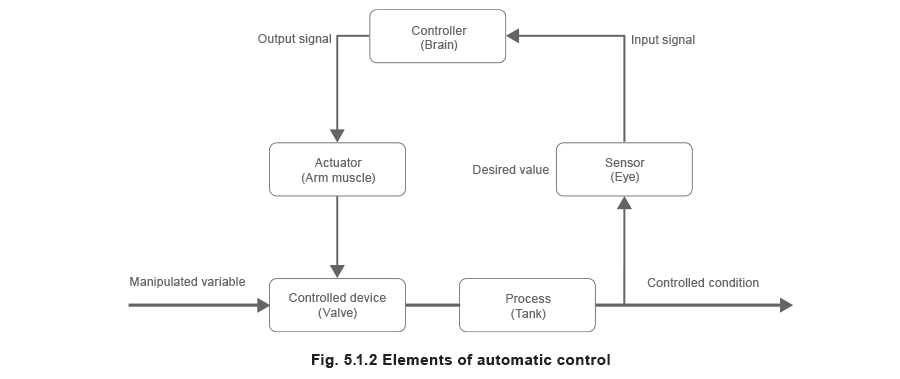
示例 5.1.2 自动控制的要素
- 操作员的眼睛检测到水位相对于刻度指示器的变化。他的眼睛可以被视为传感器。
- 眼睛(传感器)将此信息信号传回大脑,大脑注意到偏差。大脑可以被视为控制器。
- 大脑(控制器)向手臂肌肉和手发出信号,这可以被视为执行器。
- 手臂肌肉和手(执行器)转动阀门,这可以被视为被控装置。 值得以稍微不同的方式重复这些要点,以强化示例 5.1.2: 简单来说,操作员在示例 5.1.1 中的目标是将水箱中的水维持在预定义的液位。液位 3 可以被视为他的目标或设定点。 操作员通过调节进水阀(控制装置)来物理地操纵液位。在此操作中,需要考虑操作员的能力和注意力。因此,水位不太可能始终恰好在液位 3。通常,它会在液位 3 之上或之下的某个位置。任何特定时刻的位置或液位被称为控制值或实际值。 设定点与实际值之间的误差或差值被称为偏差。当偏差恒定或处于稳态时,被称为持续偏差或偏移量。 虽然操作员在操纵水位,但最终目的是产生一个适当的结果——在本例中是从水箱流出所需的水流量。 ****评估安全性、稳定性和准确性 可以假设示例 5.1.1 中的典型工艺既不包含有价值的成分,也不包含有害的成分。因此,溢流或缺水是安全的,但不经济或不高效。 就稳定性而言,只要操作员全神贯注,就能够处理此工艺。 准确性不是此工艺的特征,因为操作员只能对可见的、可识别的误差做出响应。 术语总结
| 设定点 | 设置在控制系统标度上的值,以获得所需的条件。 如果控制器在某一特定应用中设置为 60°C:60°C 将被称为”设定点”。 |
|---|---|
| 期望值 | 在理想条件下应维持的要求值。 |
| 控制值 | 在稳态条件下实际维持的被控条件值。 |
| 偏差 | 设定点与控制值之间的差值。 |
| 偏移量 | 持续偏差。 |
| 传感器 | 直接响应被控条件幅度的元件。 |
| 被控介质 | 被系统控制的介质。 图 5.1.1 中的被控介质是水箱中的水。 |
| 被控条件 | 被控介质的物理状态。 图 5.1.1 中的被控条件是水位。 |
| 控制器 | 接收传感器信号并向执行器发送纠正(或控制)信号的装置。 |
| 执行器 | 响应控制器信号调节被控装置的元件。 |
| 被控装置 | 控制系统中的最终控制元件,如控制阀或变速泵。 |
自动控制中还使用许多其他术语;这些将在本模块后续部分进行说明。
温度控制系统的要素 ****示例 5.1.1 描述了一个简单的手动液位控制系统。这可以与示例 5.1.3(手动控制)和图 5.1.3 所示的简单温度控制示例进行比较。所有前述因素和定义均适用。 示例 5.1.3 描述一个简单的手动温度控制系统 任务是引入足够的蒸汽(加热介质),将进入的水从温度 T1 加热;确保热水以所需的温度 T2 离开水箱。
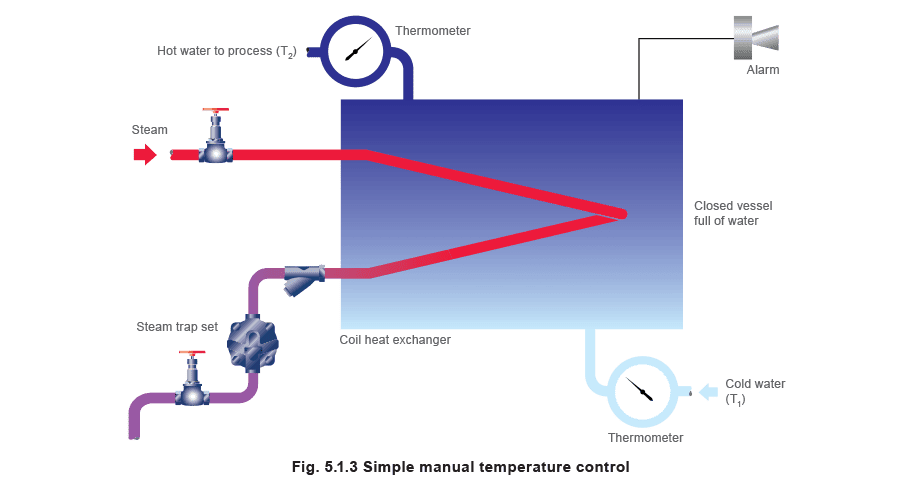
评估安全性、稳定性和准确性 虽然手动操作在示例 5.1.1 中可能能够控制水位,但在示例 5.1.3 中,由于各种原因,温度的手动控制本质上更为困难。
如果水流量发生变化,由于蒸汽中蕴含的大量热量,条件会迅速变化。操作员改变蒸汽阀位置的响应速度可能根本不够快。即使阀门关闭后,盘管中仍会残留一定量的蒸汽,这些蒸汽将继续凝结并释放热量。 预判变化 经验会有所帮助,但一般来说,操作员无法预判变化。他必须先观察到变化,然后才能做出决定并执行操作。
这一点以及其他因素,如人工操作员持续值班的不便和成本、潜在的操作员失误、工艺需求的变化、精度、条件的快速变化以及多个工艺的参与,都导致了对自动控制的需求。
在安全性方面,示例 5.1.3 中引入了声光报警器以警告超温——这是自动控制的又一理由。 自动控制 被控条件可以是温度、压力、湿度、液位或流量。这意味着测量元件可以是温度传感器、压力变送器或转换器、液位检测器、湿度传感器或流量传感器。
操纵变量可以是蒸汽、水、空气、电力、油或气体,而被控装置可以是阀门、风门、泵或风机。
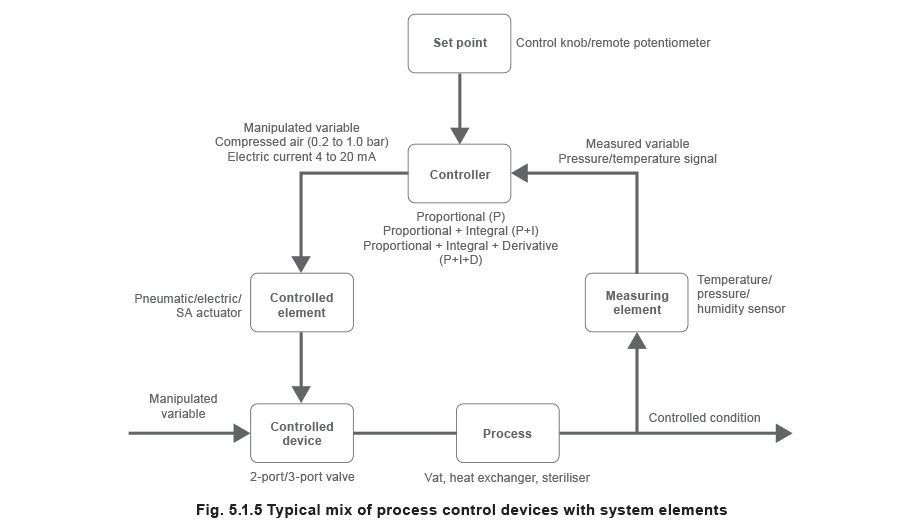
为演示基本原理,本模块将以阀门作为被控装置,温度作为被控条件,温度传感器作为测量元件。 自动控制的组成部分 图 5.1.4 说明了基本控制系统的组成部分。传感器向控制器发出信号。控制器(可以接收来自多个传感器的信号)根据这些信号判断是否需要改变操纵变量。然后命令执行器将阀门移动到不同的位置——根据需要更开或更关。
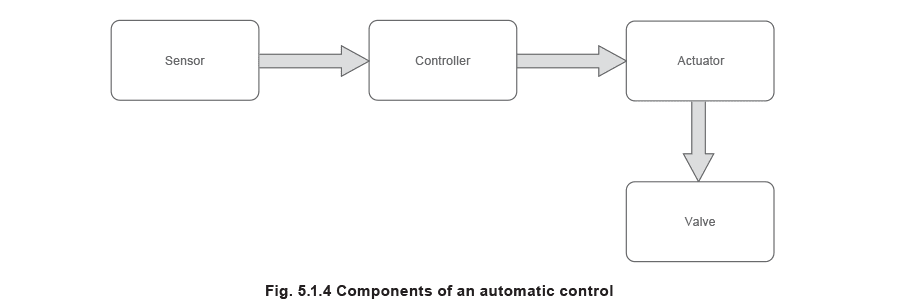
控制器通常按其动力来源分类,如电动、气动、液压或机械式。
执行器可以被视为电机。执行器也按其动力来源分类,与控制器相同。 阀门按其用于开启或关闭流通孔口的动作以及其阀体结构分类,例如是滑动阀杆还是旋转运动。 如果将系统要素与系统部分(或装置)结合起来,就可以看到”需要做什么?“与”如何做?“之间的关系。 所使用的一些术语可能还不熟悉。然而,在本模块 5 的后续部分中,将介绍上图中所示的所有单独组件和项目。